The innovation that will bring your robot to a higher level.
The future of locomotion
powered by innovation
This invention constitutes a fundamental breakthrough in the development of self-propelled robots and marks the point of origin of the modern gait. It is grounded in the foundational principle from which locomotion—the organized propulsion of a system—emerged. Cyrill’s Principle is not merely a technical innovation but a necessary precondition for the emergence of efficient gait, and is therefore indispensable to any system that aspires to autonomous locomotion.
The operation of this principle is demonstrated convincingly by a working prototype, supported by a purpose-built algorithm. This prototype makes visible the mechanisms underlying the evolution of gait. Crucially, it shows that legs did not constitute the starting point: they were introduced at a later stage of development and are therefore not the primary driving factor behind locomotion.
The capacity of an organism or system to move autonomously is directly coupled to its ability to effect controlled structural deformation. In biological systems, movement arises from coordinated cycles of contraction and extension of tissues, yielding a dynamic interaction with the environment. This interaction can be characterized as the dynamics of deformation and resistance modulation: a moving body continually alters the resistance it encounters, manipulating it to create differential regions of high and low resistance.
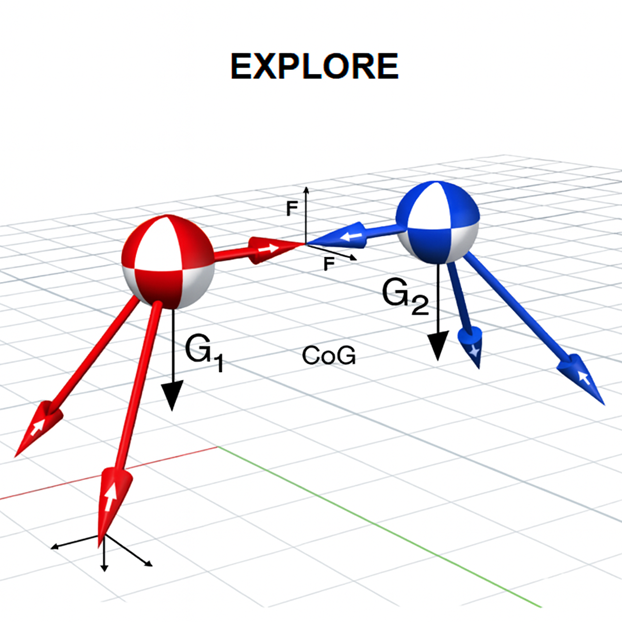
At first sight, effective locomotion with only two segments appears impossible, since symmetric changes in resistance yield no net displacement. Cyrill’s Principle, however, demonstrates that—provided the appropriate dynamic conditions are established—efficient locomotion can be achieved even with a two-segment system. By coordinating the masses of the two segments, a collective motion emerges that enables purposeful and efficient progression.
Explore and Implement the Axiom of Cyrill in your robot
To make the construction of this robot as simple, cost-effective, and accessible as possible for everyone,
the Evolutronix line has been specifically designed for scientific R&D